初识ROS
时间:2021-02-28 21:49:04
收藏:0
阅读:29
一、启动核心服务点和仿真节点
roscore #核心服务点
rosrun turtlesim turtlesim_node #仿真节点
二、创建新的海龟turtle3
rosservice call /spawn "x: 5.0
y: 0.0
theta: 0.5
name: ‘turtle3‘"
三、控制海龟turtle3原地做圆周运动
rostopic pub -r 10 /turtle3/cmd_vel geometry_msgs/Twist "linear:
x: 0.5
y: 0.0
z: 0.0
angular:
x: 0.0
y: 0.0
z: 1.0"

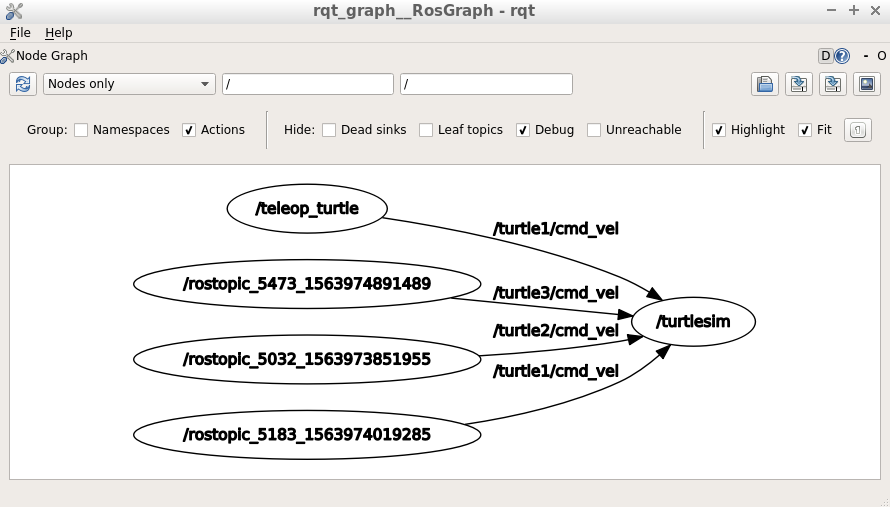
四、查看海龟仿真系统的计算图
rqt_graph
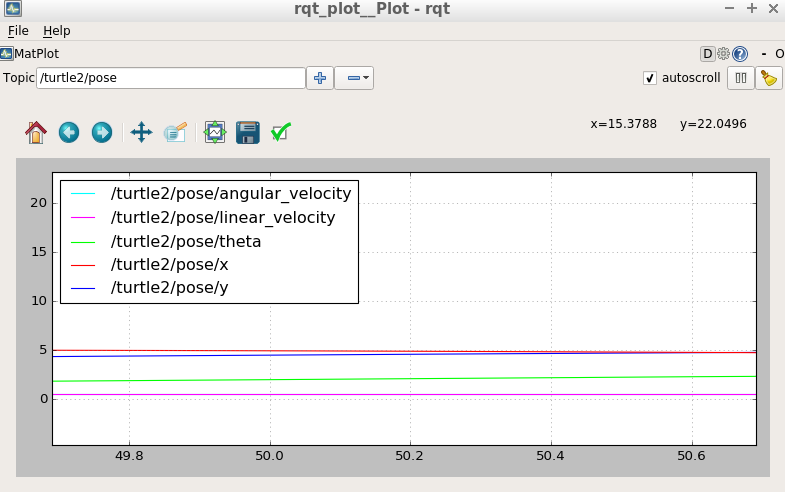
五、查看 /turtle2/pose的可视化信息
rqt_plot
六、查看 /turtle2/pose的实时信息
rostopic echo /turtle2/pose
原文:https://www.cnblogs.com/yujingxiang/p/14460130.html
评论(0)